
Introduction to I2C:
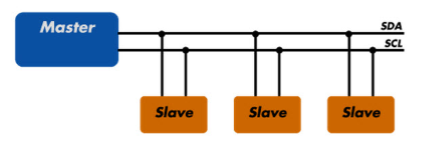
I2C terminology

Application
/* Name : eprom.c
* Purpose : Source code for Serial EEPROM AT24C02 with PIC18F4550.
* Author : Gemicates
* Date : 2017-07-06
* Website : www.gemicates.org
* Revision : None
*/
// Program to interface Serial EEPROM AT24C02 with PIC18F4550 microcontroller
#include <htc.h> // Header file for PIC18F4550 series
#define _XTAL_FREQ 12000000 // 12MHz Crystal Frequency for PIC18F4550
// register declaration
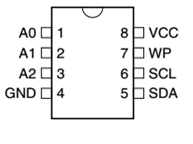
#define sda PORTBbits.RB0 // To assign RB0 bit in PORTB as Serial data pin for 24C02C EEPROM
#define scl PORTBbits.RB1 // To assign RB1 bit in PORTB as Serial Clock pin for 24C02C EEPROM
#define SW1 PORTBbits.RB2 // To assign RB2 bit in PORTB as input
#define SW2 PORTBbits.RB3 // To assign RB3 bit in PORTB as input
#define SW3 PORTBbits.RB4 // To assign RB4 bit in PORTB as input
#define SW4 PORTBbits.RB5 // To assign RB5 bit in PORTB as input
#define rs PORTCbits.RC0 // To assign RC0 bit in PORTC as register select pin
#define rw PORTCbits.RC1 // To assign RC1 bit in PORTC as read write pin
#define en PORTCbits.RC2 // To assign RC2 bit in PORTC as enable pin
#define led PORTCbits.RC4 // To assign RC4 bit in PORTC as led output pin
#define led1 PORTCbits.RC5 // To assign RC5 bit in PORTC as led1 output pin
#define lcd_data_pin PORTD // To assign PORTD as output
#define output PORTA // To assign PORTA as output
// Function declarations
void send_byte(unsigned char value);
void lcd_command (unsigned char comm);
void lcd_data(unsigned char disp);
bit ack;
unsigned char reead,write,write2,i,j,k;
unsigned int temp;
void lcd_command(unsigned char comm) // Function to send command to LCD
{
lcd_data_pin=comm;
en=1;
rs=0;
rw=0;
__delay_ms(30);
en=0;
}
void lcd_data(unsigned char disp) // Function to send data to LCD
{
lcd_data_pin=disp;
en=1;
rs=1;
rw=0;
__delay_ms(30);
en=0;
}
void lcd_dataa(unsigned char *disp) // Function to send string on LCD
{
int x;
for(x=0;disp[x]!=0;x++)
{
lcd_data(disp[x]);
}
}
void lcd_ini() // Funtion to Initialize LCD
{
lcd_command(0x38); // for using 8-bit 2 row LCD
__delay_ms(30);
lcd_command(0x0F); // for display on, cursor blinking
__delay_ms(30);
lcd_command(0x80); // to set cursor at 1st position of 1st row of LCD.
__delay_ms(30);
}
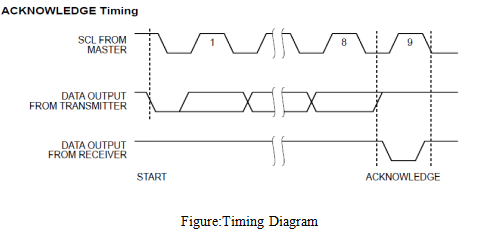
void aknowledge() // acknowledge condition
{
scl=1;
__delay_ms(30);
__delay_ms(30);
scl=0;
}
void start() // start condition
{
sda=1;
scl=1;
sda=0;
scl=0;
}
void stop() // stop condition
{
sda=0;
scl=1;
sda=1;
scl=0;
}
void send_byte(unsigned char value) // send byte serially
{
unsigned int i;
unsigned char send;
send=value;
for(i=0;i<8;i++)
{
sda=send/128; // extracting MSB
send=send<<1; // shiftng left
scl=1;
scl=0;
}
ack=sda; // reading acknowledge
sda=0;
}
unsigned char read_byte() // reading from EEPROM serially
{
unsigned int i;
sda=1;
reead=0;
for(i=0;i<8;i++)
{
reead=reead<<1;
scl=1;
if(sda==1)
reead++;
scl=0;
}
sda=0;
return reead; // Returns 8 bit data here
}
void Save() // save in EEPROM
{
start();
send_byte(0xA0); // device address
aknowledge();
send_byte(0x0000); // word address
aknowledge();
send_byte('G'); // send data
aknowledge(); // send aknowledgement for data
send_byte('E');
aknowledge();
send_byte('M');
aknowledge();
send_byte('I'); // send data
aknowledge();
send_byte('C');
aknowledge();
send_byte('A');
aknowledge();
send_byte('T'); // send data
aknowledge();
send_byte('E');
aknowledge();
send_byte('S');
aknowledge();
stop();
if(ack==0)
{
led=0;
__delay_ms(30); // delay function of 30ms
lcd_command(0x86); // To display the data on 6th position in 1st row
lcd_data('G');
lcd_command(0x87); // To display the data on 7th position in 1st row
lcd_data('E');
lcd_command(0x88); // To display the data on 8th position in 1st row
lcd_data('M');
lcd_command(0x89); // To display the data on 9th position in 1st row
lcd_data('I');
lcd_command(0x8A); // To display the data on 10th position in 1st row
lcd_data('C');
lcd_command(0x8B); // To display the data on 11th position in 1st row
lcd_data('A');
lcd_command(0x8C); // To display the data on 12th position in 1st row
lcd_data('T');
lcd_command(0x8D); // To display the data on 13th position in 1st row
lcd_data('E');
lcd_command (0x8E); // To display the data on 14th position in 1st row
lcd_data('S');
led=1;
__delay_ms(30);
}
else
led1=0;
aknowledge();
void Read() // Function of read the data
{
start();
send_byte(0xA0);
aknowledge();
send_byte(0x0000);
aknowledge();
start();
send_byte(0xA1); // device address
aknowledge();
i=read_byte();
aknowledge();
j=read_byte();
aknowledge();
k=read_byte();
aknowledge();
stop();
}
void Read_dep()
{
start();
send_byte(0xA0);
aknowledge();
send_byte(0x0003);
aknowledge();
start();
send_byte(0xA1); // device address
aknowledge();
i=read_byte();
aknowledge();
j=read_byte();
aknowledge();
k=read_byte();
aknowledge();
stop();
}
void Read_session()
{
start();
send_byte(0xA0);
aknowledge();
send_byte(0x0006);
aknowledge();
start();
send_byte(0xA1); // device address
aknowledge();
i=read_byte();
aknowledge();
j=read_byte();
aknowledge();
k=read_byte();
aknowledge();
stop();
}
void main() // main function
{
TRISD=0x00; // TRISD register as output
TRISA=0x00; // TRISA register as output
TRISC=0x00; // TRISC register as output
TRISB=0x00; // TRISB register as output
PORTD=0x00; // PORTD as output
PORTA=0x00; // PORTA as output
PORTC=0x00; // PORTC as output
PORTB=0x00; // PORTB as output
lcd_ini();
lcd_dataa("Sent :");
while(1) // Infinite loop
{
if(SW1==0)
{
Save();
}
if(SW2==0)
{
led1=0;
Read ();
led1=1;
}
if(SW3==0)
{
led1=0;
Read_dep();
led1=1;
}
if(SW4==0)
{
led1=0;
Read_session();
led1=1;
}
}
// return 0;
}